Robotics Engineering Projects (2023–2025)










A desktop-scale mobile manipulation engineering series covering end-effectors, arm platforms, and wheeled bases. Structural design, system integration, MuJoCo simulation, and ROS2 interfaces form an iterative CAD → prototype → validation engineering loop.
One-line
An engineering series centered on desktop-scale mobile manipulation systems, integrating end-effectors, arm platforms, and wheeled bases.
Through simulation and control validation, the projects establish an iterative engineering loop from CAD to prototype to verification.
Info
- Time / Location: 2023–2025 · Beijing / Wuxi
- Focus: Mobile manipulation · mechanical system integration · end-effector development
- Scope: End-effector → Arm platform → Mobile base (modular system chain)
- Role: System planning · structural design & assembly · prototyping · simulation validation · control interface preparation & testing
- Status: Multi-stage prototypes completed (Series)
Toolchain
Mechanical Design
SolidWorks · Fusion 360 · Rhino
Simulation & Control
MuJoCo · ROS2 · Kinematic modeling · PID control
Fabrication
3D printing · structural assembly · rapid iteration testing
System Capabilities
Modular architecture · structural optimization · mechanical–control integration
Keywords: Robotics · Mobile Manipulation · Mechanical Integration · End-effector · Simulation · Prototype Iteration
Goal & Challenge
The series targets desktop-scale mobile manipulation: integrating a mobile base, robotic arm, and end-effector into a maintainable and extensible operational platform under constraints of size and cost.
The core challenge lies in the strong coupling between mechanical design and control requirements.
Trade-offs must be made among load capacity, stiffness, contact stability, cable routing, and maintainability.
Simulation and rapid prototyping are used to reduce iteration cost and de-risk structural decisions.
System — Platform Architecture
The projects adopt a platform-based + modular architecture, forming a system chain from grasping to full-body integration:
Mobile Base
Desktop-scale wheeled platform focusing on structural stability, load optimization, and maintainability.
Arm Platform
Modular mechanical arm with standardized interfaces, supporting educational experiments and interchangeable attachments.
End-effector
Track-driven gripper design improving contact adaptability and grasp stability.
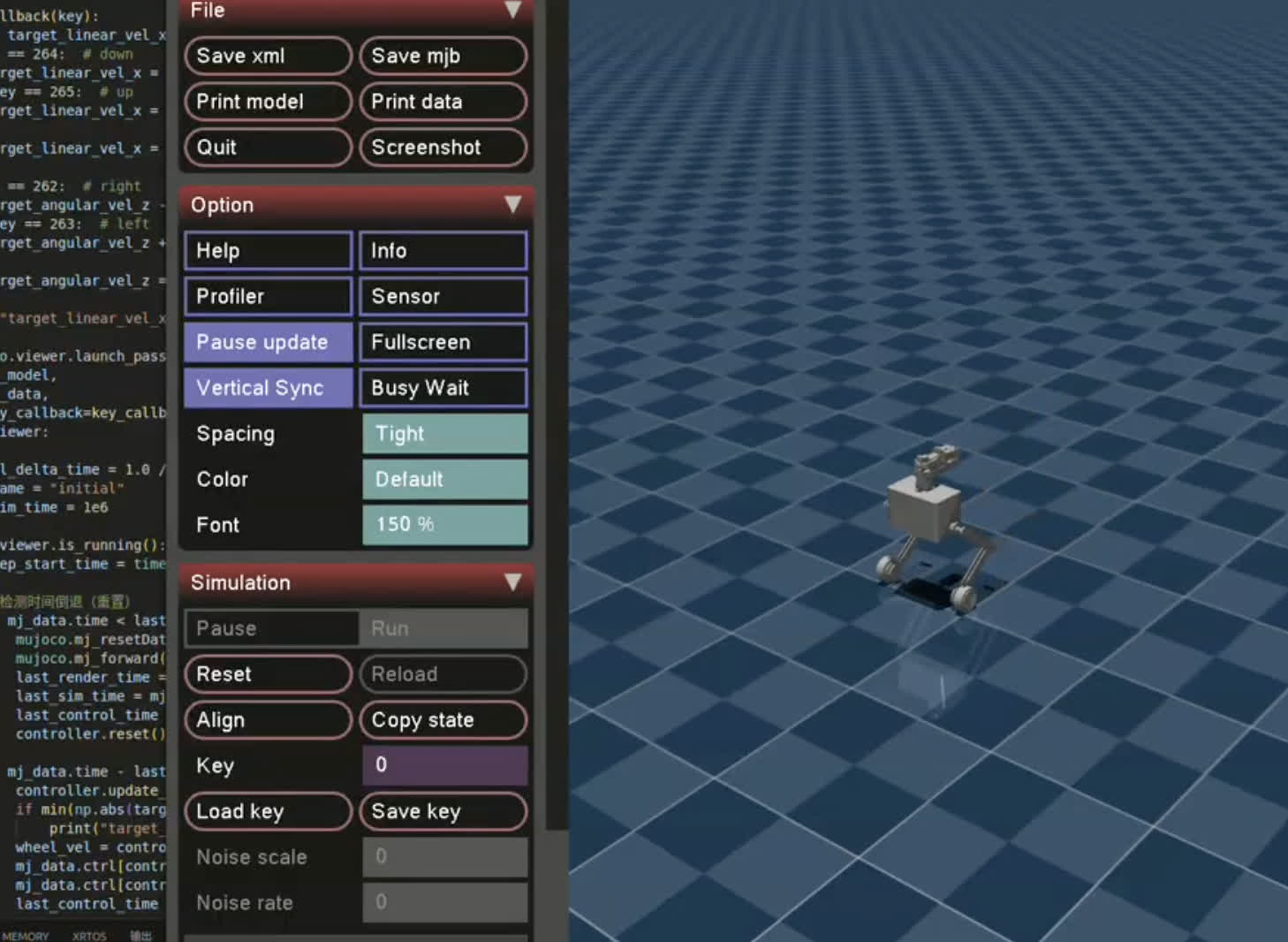
Simulation-to-Prototype Loop
CAD → 3D printing → assembly → MuJoCo contact & motion validation → ROS2 interface testing.
This loop establishes a repeatable engineering rhythm across all builds.
Validation & Current Builds
01 — Wheelarmbot | Desktop Mobile Manipulation Platform
A lightweight integrated wheeled base + robotic arm system for coordinated mobility and manipulation tasks.
Engineering focus includes structural load distribution, arm–base coupling, whole-body coordination logic, and desktop-scale stability.
Tools: SolidWorks · MuJoCo · ROS2
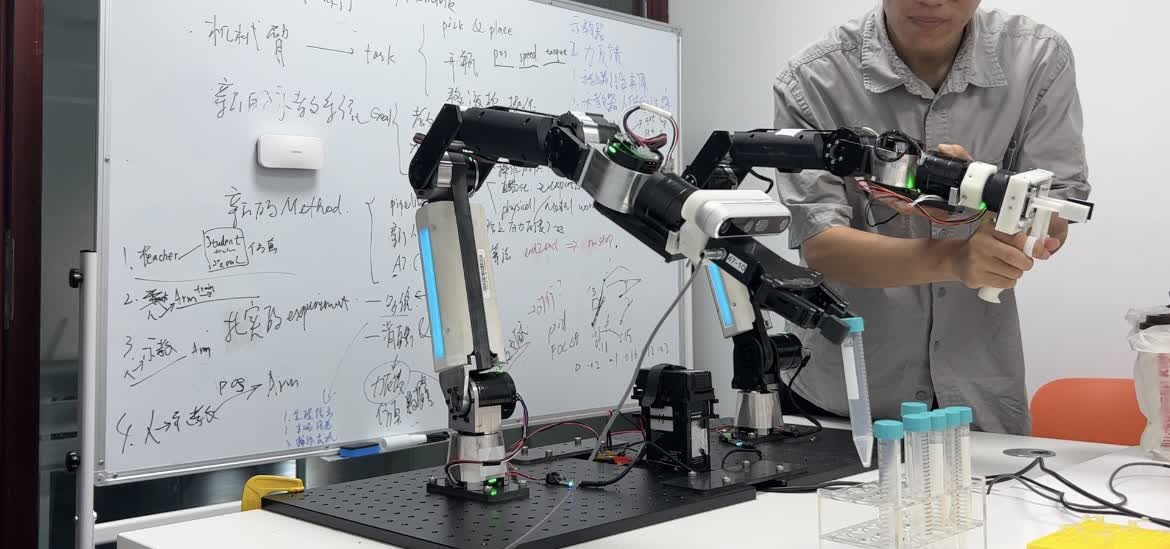
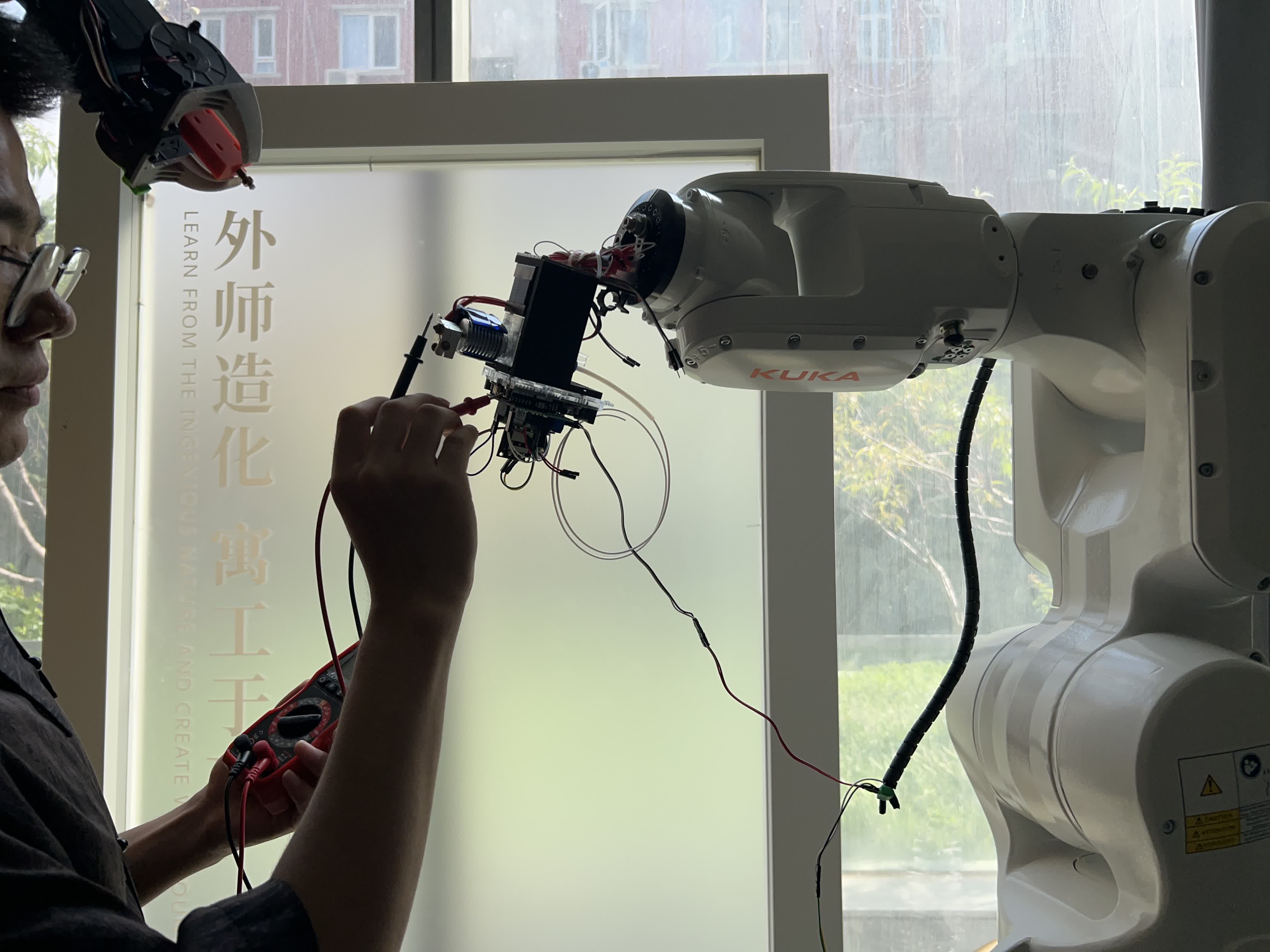
02 — Robotic Arm Platform & Derivative Modules
A modular arm-centered platform emphasizing extensibility and interface standardization.
Includes replaceable 3D-printed attachments, standardized mounting structures, and remote mapping experiments.
Tools: Fusion 360 · SolidWorks · Rhino · ROS2
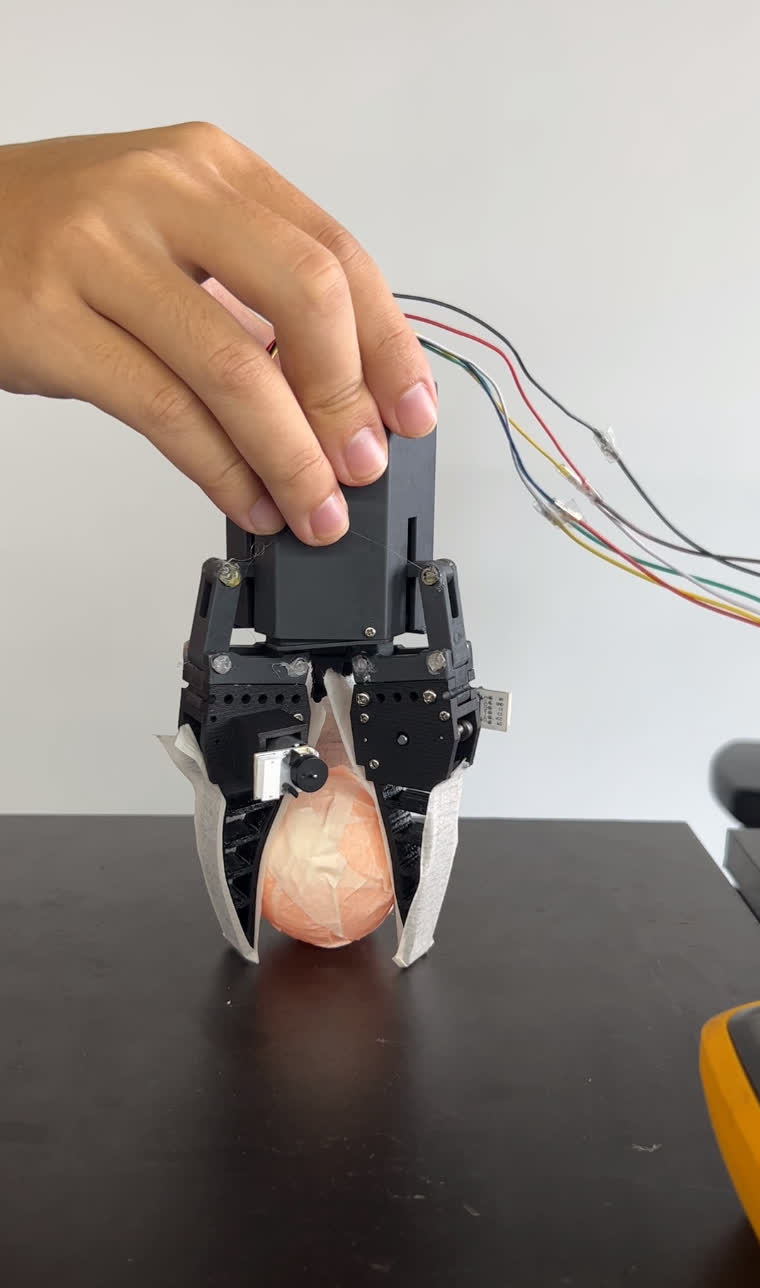
03 — Track-Controlled Hand-Operated Gripper
A track-driven end-effector designed to enhance grasp stability and surface adaptability.
Focus areas include transmission mechanism design, flexible structural optimization, force path routing, and modular mounting interface.
Tools: SolidWorks · 3D Printing · MuJoCo (contact modeling)
Next — Design Targets
Platform Interfaces
Further unify electrical and mechanical interface standards to improve module interchange efficiency.
Control & Learning Pipeline
Refine ROS2 control architecture and simulation parameter calibration to support reinforcement learning and policy training.
Grasp Reliability
Enhance contact modeling and force validation to improve reproducibility in real tasks.
Maintainability
Optimize cable routing, structural disassembly, and quick-replacement mechanisms to establish an engineering-grade iteration rhythm.
Credits
Series · 2023–2025 · Beijing / Wuxi